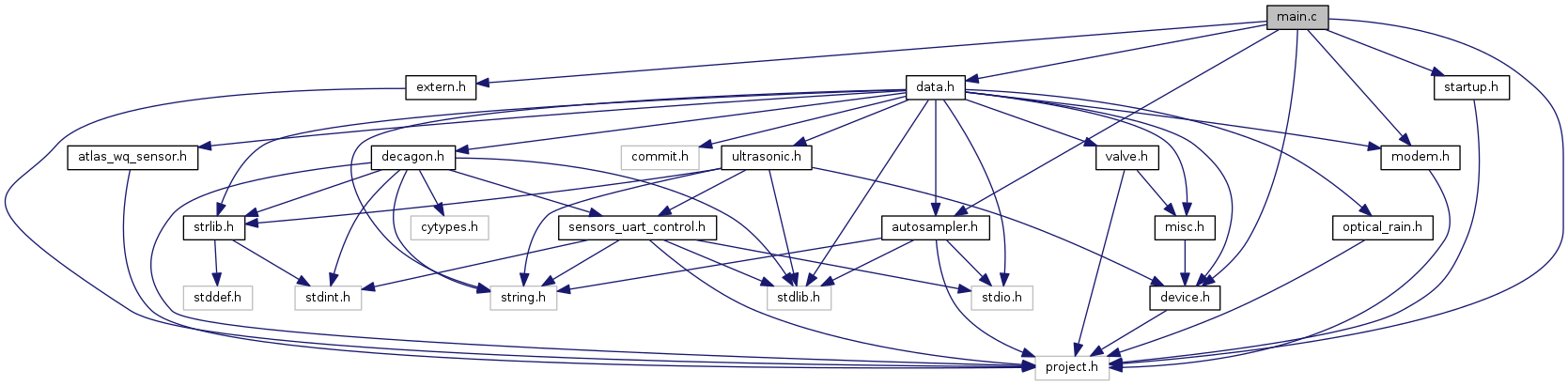
Contains the main "operating system" for the sensor node. At a recurring interval, this program:
More...
#include <device.h>
#include <project.h>
#include "autosampler.h"
#include "data.h"
#include "extern.h"
#include "modem.h"
#include "startup.h"
|
|
void | clear_all_arrays (uint8 clear_readings_and_labels) |
| |
|
| CY_ISR_PROTO (Wakeup_ISR) |
| |
|
| CY_ISR (Wakeup_ISR) |
| |
|
void | main () |
| |
|
|
char | body [MAX_SEND_LENGTH] = {'\0'} |
| |
|
char | socket_dial_str [100] = {'\0'} |
| |
|
char | send_str [MAX_SEND_LENGTH] = {'\0'} |
| |
|
char | response_str [MAX_RECV_LENGTH] = {'\0'} |
| |
|
char * | labels [NVARS] |
| |
|
float | readings [NVARS] |
| |
|
uint8 | awake = 1u |
| |
|
uint32 | wakeup_interval_counter = 0u |
| |
|
uint8 | connection_counter = 0u |
| |
|
int | status |
| |
|
uint8 | data_sent |
| |
|
uint8 | ssl_initialized = 0u |
| |
|
char | meid [20] = {'\0'} |
| |
|
int | numFilled = 0 |
| |
Contains the main "operating system" for the sensor node. At a recurring interval, this program:
- "wakes" the board from sleep mode,
- takes measurements using the attached sensors,
- connects to the cellular network,
- sends sensor data to a web server,
- updates device metadata and onboard parameters,
- triggers attached actuators, and
- puts the board back into sleep mode.
- Author
- Brandon Wong, Matt Bartos, Abhiramm Mullapudi, Branko Kerkez, Ivan Mondragon
- Version
- TODO
- Date
- 2017-05-31
 1.8.11
1.8.11

