|
Open Storm
|
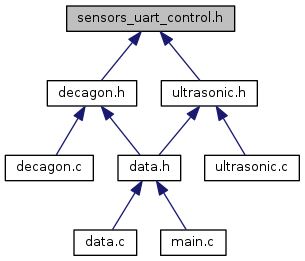
A collection of common patterns used to interface with the sensors UART. More...
#include <project.h>#include <stdlib.h>#include <string.h>#include <stdio.h>#include <stdint.h>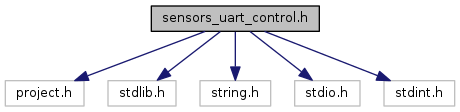
Go to the source code of this file.
Functions | |
| void | sensors_uart_start () |
| Starts the sensors UART with generic interrupt service. | |
| void | sensors_uart_stop () |
| Stops the sensors UART and generic interrupt service. | |
| void | sensors_uart_set_baud (const uint32_t baud) |
| Sets the baud rate for the sensors uart. More... | |
| char * | sensors_uart_get_string () |
| Get the uart received string. More... | |
| size_t | sensors_uart_get_string_size () |
| Get the size of the string in the buffer. More... | |
| void | sensors_uart_clear_string () |
| Clears internal buffer. | |
| CY_ISR_PROTO (isr_sensors_uart_rx) | |
A collection of common patterns used to interface with the sensors UART.
| char* sensors_uart_get_string | ( | ) |
Get the uart received string.

| size_t sensors_uart_get_string_size | ( | ) |
Get the size of the string in the buffer.
| void sensors_uart_set_baud | ( | const uint32_t | baud | ) |
Sets the baud rate for the sensors uart.
| baud | One of the standard baud rates. [1200, 2400, 4800, 9600, 14400, 19200, 38400, 57600, 115200, 128000, or 256000] |

 1.8.11
1.8.11

